Year Review 2022

What’s the story Rory? Is that the time of the year that you start to reflect about what you did in this year and what you want to do next year. I definitely manage to do a lot of nice… Continue Reading

What’s the story Rory? Is that the time of the year that you start to reflect about what you did in this year and what you want to do next year. I definitely manage to do a lot of nice… Continue Reading
Story Horse? Currently, there is no coroutines implementation in Java, and Project Loom is a proposal implementation. Is not yet clear when this should be added to Java, but there is a big expectation for Java 19. Check out my… Continue Reading
Hey, you! Coroutines is something old that was forgotten for many years, but because of the trending of data-intensive applications nowadays is gaining popularity, and is here to stay, which means that developers will need to learn what coroutines is.… Continue Reading
How heya? What are the differences between Data Streams, Java Streams, Reactive Streams, Kafka Streams, Spark Streams, and several others Streams? The term stream does not really say much. A stream is simply a sequence of data elements made available… Continue Reading

How’s the craic? Reactive Programming is trending nowadays and there is a lot of noise about it at the moment, not all of which is very easy to understand. Reactive Programming or Functional Reactive Programming and Reactive Streams are again… Continue Reading
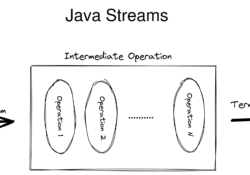
How’s the form? Introduced in Java 8, the Stream API provides a functional approach to processing collections of objects. A stream is a sequence of objects that supports various methods which can be pipelined to produce the desired result. I… Continue Reading
How heya? This is another blog about Java on Raspberry Pi where I try to show that Raspberry PI is a good place to start programming with Java and you can use all Java ecosystem and programs to play around… Continue Reading

How goes the battle? This post is another part of my Kafka weather station use case idea. I want to show how I created an app using Spring Boot and Thymeleaf to show a real-time dashboard with Sense Hat temperature… Continue Reading

What’s up? This blog post compares two similar technologies: WebSockets (WS) VS Server-Sent Events (SSEs) and is a collection of links, videos and blogs that I found mixed with my opinion. Table of contents 1. HTTP/1.1 vs HTTP/2 2. What… Continue Reading

How the hell are you? Spring framework has evolved to become the most widely used Enterprise Java development framework. I hope you already know that the Spring framework is structured as a bunch of independent projects. A simple search for… Continue Reading