Year Review 2022

What’s the story Rory? Is that the time of the year that you start to reflect about what you did in this year and what you want to do next year. I definitely manage to do a lot of nice… Continue Reading

What’s the story Rory? Is that the time of the year that you start to reflect about what you did in this year and what you want to do next year. I definitely manage to do a lot of nice… Continue Reading

How’s the lad? This is another blog about Raspberry PI, and today I want to talk about Raspberry Pi Hats or pHats. Thanks to their GPIO headers, most Pi computers can connect to devices called HATs, which stands for Hardware… Continue Reading
How heya? This is another blog about Java on Raspberry Pi where I try to show that Raspberry PI is a good place to start programming with Java and you can use all Java ecosystem and programs to play around… Continue Reading

How goes the battle? This post is another part of my Kafka weather station use case idea. I want to show how I created an app using Spring Boot and Thymeleaf to show a real-time dashboard with Sense Hat temperature… Continue Reading
How’s it going there? This post is to show how I created a web app to control an LCD with a Raspberry PI using Spring Boot and Thymeleaf. This is another blog about Java on Raspberry PI. Spring Boot is… Continue Reading

Hey you! This is a start point for me to explore some ideas to learn Kafka and Event Streams in a fun way. My plan is to create a way to teach people Kafka concepts combining with some kind of… Continue Reading
What’s the craic? In this blog, I want to set up a base use case that I can explore in future blogs. The weather stations are a simple idea where I can use a different source of data to get… Continue Reading

How’s the lad? 2021/04/18 This post is to show how I created an app demo to control a 4-7 segment display with a Raspberry PI. This is another blog about Java on Raspberry PI. It’s kind of a continuation from… Continue Reading
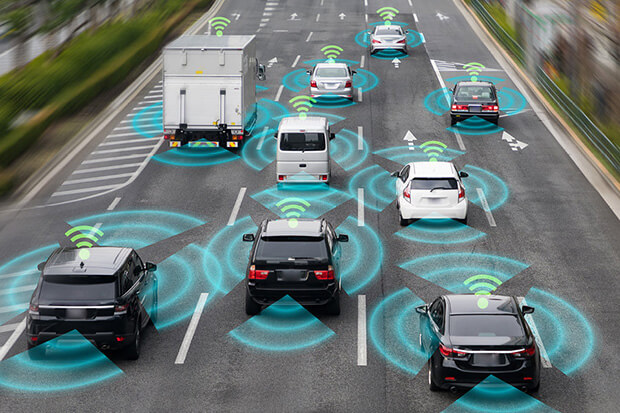
How’s the form? 2021/03/08 The term connected vehicles refer to applications, services, and technologies that connect a vehicle to its surroundings. A connected vehicle includes the different communication devices (embedded or portable) present in the vehicle, that enable in-car connectivity… Continue Reading

What’s up? 2021/03/05 This is another blog about Raspberry PI, and today I want to show how I did a simple Kafka cluster demo. It’s kind of a continuation from my two previous blogs, Kafka at the edge with Raspberry… Continue Reading